Share
Modeling and simulation of mechanical systems
ReportQuestion
Please briefly explain why you feel this question should be reported.
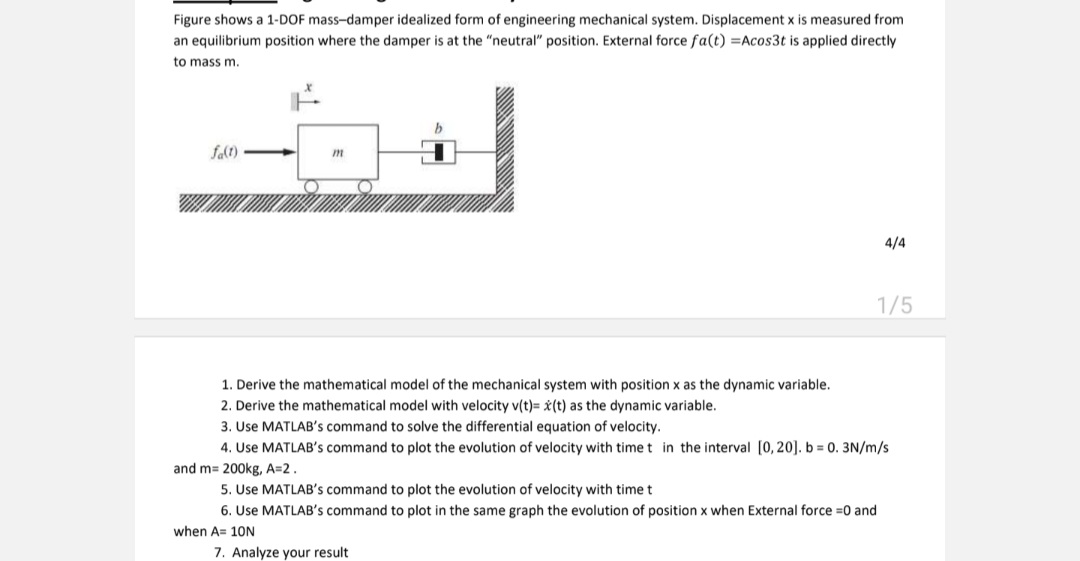
Figure shows a 1-DOF mass-damper idealized form of engineering mechanical system. Displacement x is measured from an equilibrium position where the damper is at the “neutral” position. External force fa(t) =Acos3t is applied directly to mass m.
1. Derive the mathematical model of the mechanical system with position x as the dynamic variable.
2. Derive the mathematical model with velocity v(t)= x(t) as the dynamic variable.
3. Use MATLAB’s command to solve the differential equation of velocity.
4. Use MATLAB’s command to plot the evolution of velocity with time t in the interval [0, 20]. b = 0. 3N/m/s and m= 200kg, A=2.
5. Use MATLAB’s command to plot the evolution of velocity with time t
6. Use MATLAB’s command to plot in the same graph the evolution of position x when External force =0 and
when A= 10N
7. Analyze your result
Answer ( 1 )
Please briefly explain why you feel this answer should be reported.